主题
功能图鉴中列举了控制类硬件设计中的常见的电子器件,在电赛控制类题目、工创赛硬件部分、电子类相关比赛中可进行参考 😉
如果你发现你对这些玩意儿很感兴趣的话,可以多逛逛
某宝(不是广告),你会发现很多新天地 🤔目录清单仍在完善,欢迎在视频评论区或文档评论区补充,UP会一点一点一点一点填坑的,感谢大家滴支持 🤓
更多好玩儿的有用的都在B站合集里,UP无偿更新还请大家多多三连关注支持!在此感谢大家!!!
HW-1 工具类
中国有句古话叫”工欲善其事必先利其器“,一个好的工具十分重要。
1-1 结构工具
1-1.1 + - 螺丝刀
这个大家一定都有,没有的话实验室里绝对有无数个。
2.0一字/3.0一字螺丝刀 在固定接线端子时必要;5.0十字螺丝刀 在固定螺丝时很常用;

1-1.2 内六角扳手/开口六角扳手
用于固定螺丝螺母和特殊结构,
内六角扳手常用的尺寸一般1.5mm~8mm
电子控制类使用的开口六角扳手尺寸一般在5mm~7mm区间,M3螺母对应5.5mm(比一般卖的都小,可以搜航模扳手),过大的扳手用不上

内六角扳手

开口六角扳手
1-1.3 手捻钻扩孔打孔器
在PVC和PP底板上打孔的好东西,一旦改结构就十分必要,除了比较费手没有缺点,当然你也可以问问学校有没有电动的或者是机床。

1-2 焊接工具
可以进行焊接元件/导线,焊上去的焊锡本身导电。
1-2.1 电烙铁 + 焊锡 + 松香(助焊剂)
可以在PCB电路板/万用电路板(电路洞洞板)上焊接元件,焊上去的焊锡本身导电,可以让元件的引脚固定在板子上并良好导电

1-2.2 热风枪 + 焊锡膏
可以对板子区域加热,适合焊接很小很小(引脚间距小,元件尺寸小)封装的元件,或同时焊接好多个小元件,或需要焊接的引脚没有露出来(在侧面或者底部)的元件。

1-2.3 加热台 + 焊锡膏
可以对整个板子加热,可以同时焊接好多个小元件,或需要焊接的引脚没有露出来(在侧面或者底部)的元件。

HW-2 结构类
作为电子设计硬件的承重、定型部分,应当具有较高的耐化学性、阻燃性和耐用性,但在非限定结构的比赛(如电赛)中更重要的是易于结构组装。
2-1 底板/平面支撑板
2-1.1 PVC/亚克力板(塑料板)
最常见的平面结构板材,以PVC(聚氯乙烯塑料材料)为材料,价格相对低,较硬。
厚度:常用3mm厚度
尺寸:常见尺寸10cm*10cm以上,部分厂家支持CAD图纸切割
可以较费手地用手捻钻扩孔打孔器钻孔,3mm厚度极难用手工工具开窗或更改形状

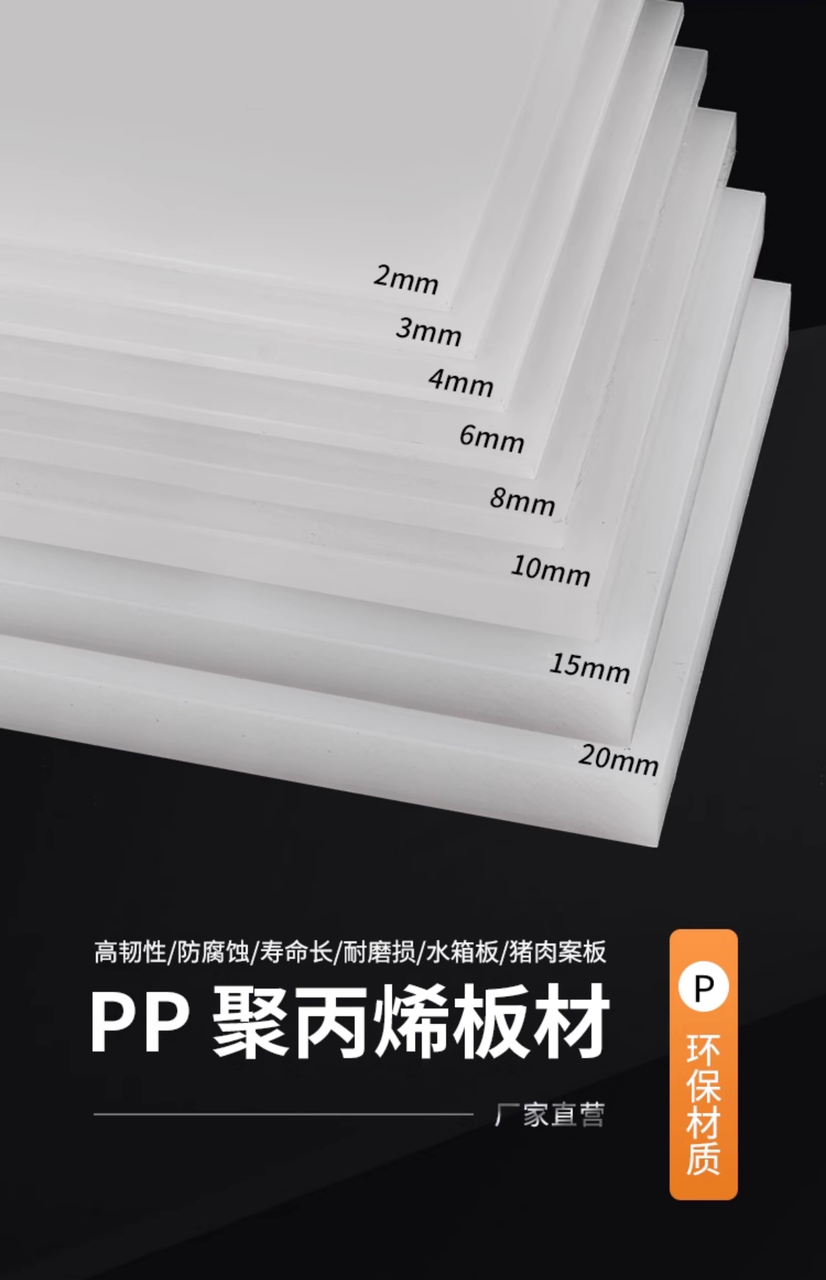
2-1.2 PP板(塑料板)
较常见的平面板材结构,PP即聚丙烯板材,不是很硬,易变形
厚度:常用3mm厚度
尺寸:常见尺寸10cm*10cm以上,部分厂家支持CAD图纸切割
可以不太费手地用手捻钻扩孔打孔器钻孔,3mm厚度下会费手地用手工工具开窗或更改形状,硬度不及PVC,不建议作为关键承重部分,会有明显形变。
2-1.3 铝合金板
最硬的板子,手工加工就别想了,一次出厂就定形,除非自己有把握或者是赛题已经确认,一般不会用。
但是也可以仅用合金板作为承重板,使用铝合金承重+塑料板功能拓展的方案,仍然使用PVC/PP可手工加工的板材进行组装。

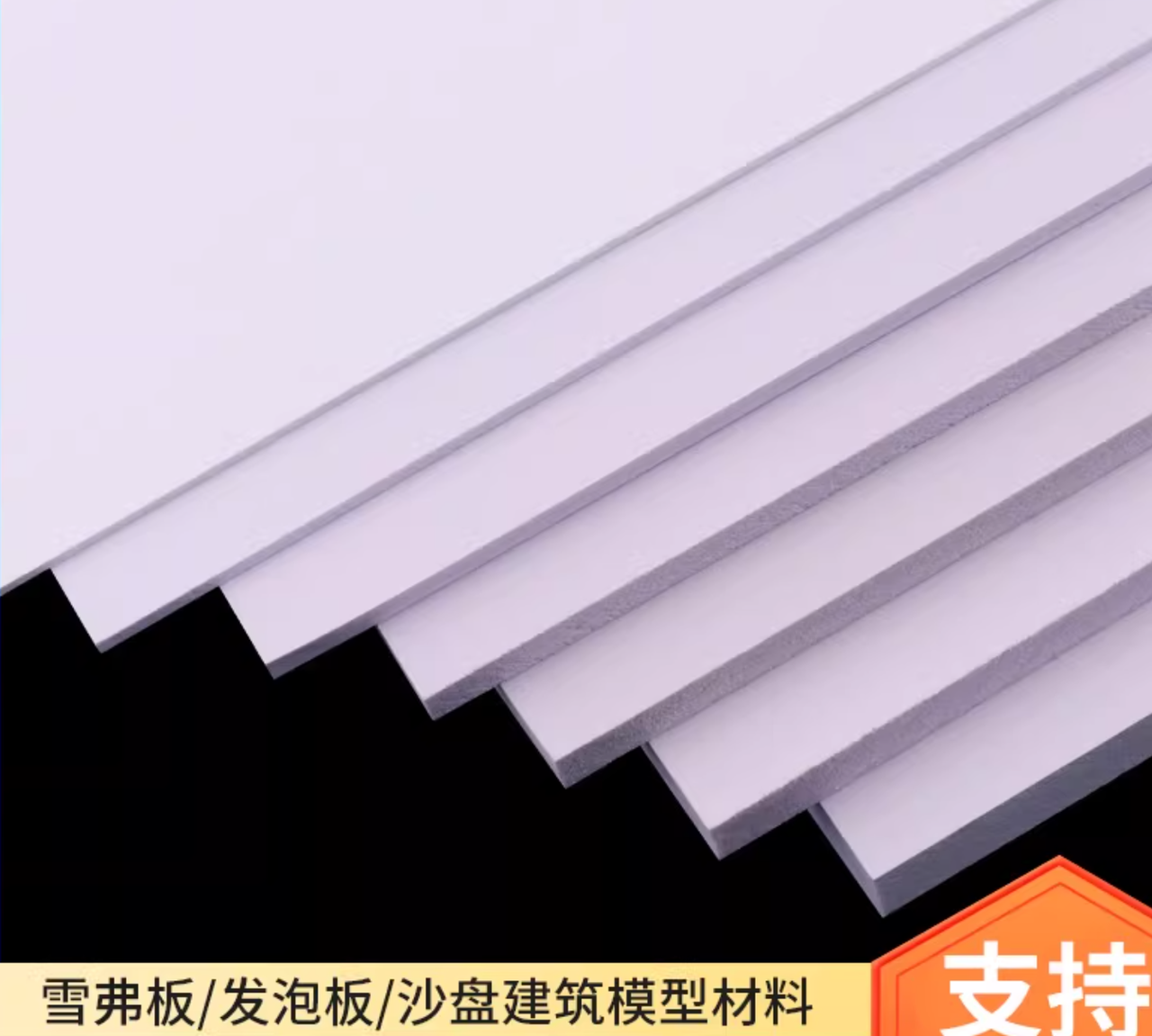
2-1.4 雪弗板
一般用于广告板,表面是漫反射,适用于视觉识别对象的表面材质。
2-2 螺纹固定件
对于螺纹固定件来讲,每一处都需保证螺纹规格的统一,如:使用M3的螺丝、M3的铜柱、M3的螺母。(M3表示螺纹直径为3mm)
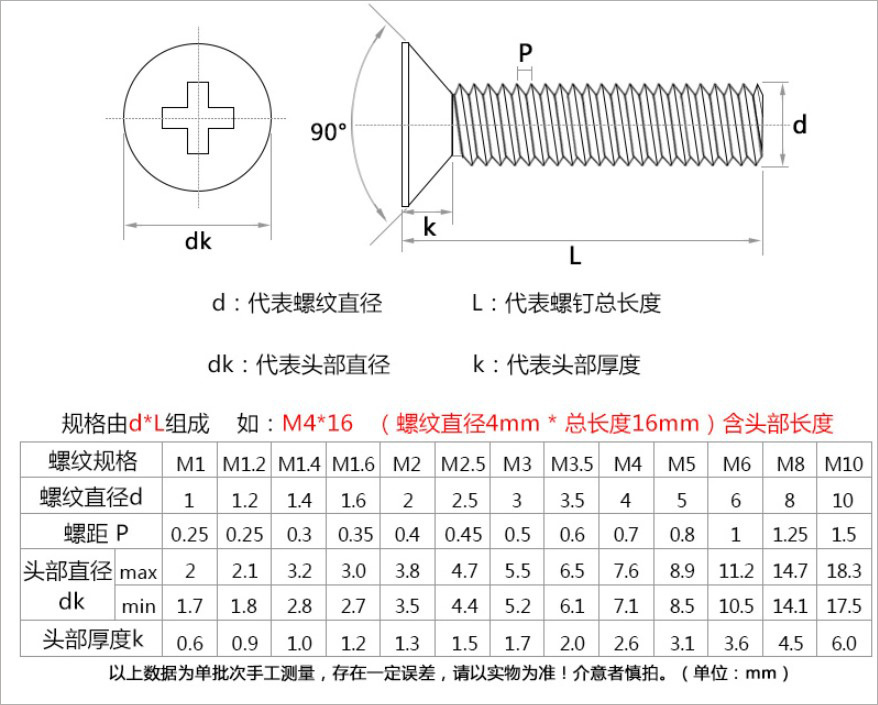
2-1.1 螺丝
细细长长的。核心两个参数 如M3-15mm:M3表示直径3mm,长度15mm,也就是下图的d和l;
d需要根据在板子上打多大直径的孔决定,根据本人经验,85%电子设计里使用的M3螺丝,5%小型电路板如某些摄像头的板子使用M2螺丝,5%大承重的结构如万向轮、牛眼轮使用M4/M5,还有5%使用M2.5这类极其少见的规格,一般都是设计师想不开了。
按头分有很多头,由于我们使用的场景大多是在一个平整的平面板材上固定,因此以圆头(平圆,扁圆)为主。
一般为了方便我们加工,较多选用十字头。尾部选用机螺钉,另一种是自攻型,不要选!!!(这一段可以不看)
但是!螺丝本身的类型太多了,我们只需要知道绝大多数正常人用什么规格就可以了:
我们最常用的是这种,追求好看可以选黑色的,看起来高级。
关键词:十字、圆头、机螺钉、M3-10mm(规格,根据实际需求选择,一般板子固定、铜柱固定选用M3-8mm)

不要选:自攻(牙间距不一致,那个尖尖的头也没用,如果要钻实验室的桌子的话就另说了)

一般不选:沉头(我们的板材大多是平整面,沉头固定时受力不均,只有中间一圈受力,如果尺寸不对的为了加强固定或者是钻到了实验室的桌子上就另说)

2-1.2 螺母
和螺丝配合使用,有时还配合垫片、弹簧垫片,用于分散压力、间隙补偿、减震缓冲。但是一般我们现阶段做的电子设计承重一般不大,很多情况下可以不用垫片依旧维持良好状态。
同理,分为M2、M2.5、M3、M4....描述中间洞洞的直径(螺纹直径)。长下面这样:

2-1.3 铜柱/尼龙柱
可以理解为,螺母的proplussupermax++版本,一个很高很高的螺母,可以用于板材与板材之间的连接,两侧可以插入螺丝/螺母。参数描述为 M3-10mm:中间洞洞的直径(螺纹直径)+铜柱长度。如下,两侧都插螺丝:

以及一侧插螺丝、一侧插螺母:

为了降低成本或者是特殊需求,有时使用尼龙柱,上面两种类型都有,需要注意尼龙柱一般可弯曲能变形,不适合做承重的结构:

2-3 结构固定支架/法兰盘
非常主流的连接件:6mm内径法兰盘,会有很多拓展用途。
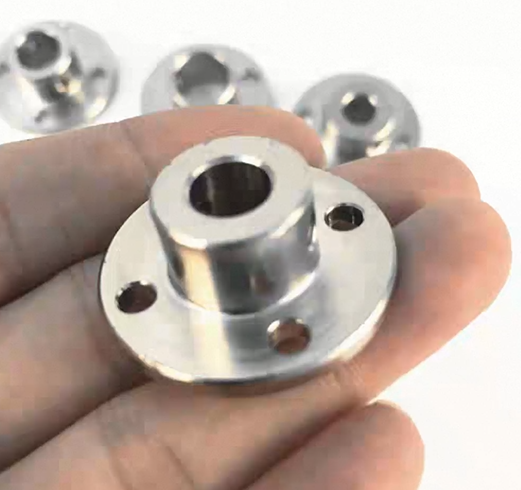
中间可以插入6mm的轴,侧面一个或两个M3螺丝 可以固定紧轴避免滑动旋转,外部四个M3螺丝固定到底板/各种成型的支架上。(见摄像头 / 舵机 支架)
2-3.1 TT马达/直流减速电机 的支架
转轴与固定螺丝的相对位置固定,使用电机支架。所有的TT马达规格一样,很常用!固定都是靠下下图标记的两个红色位置,插入2个25mm长的M3螺丝,和4个或2个M3螺母固定。
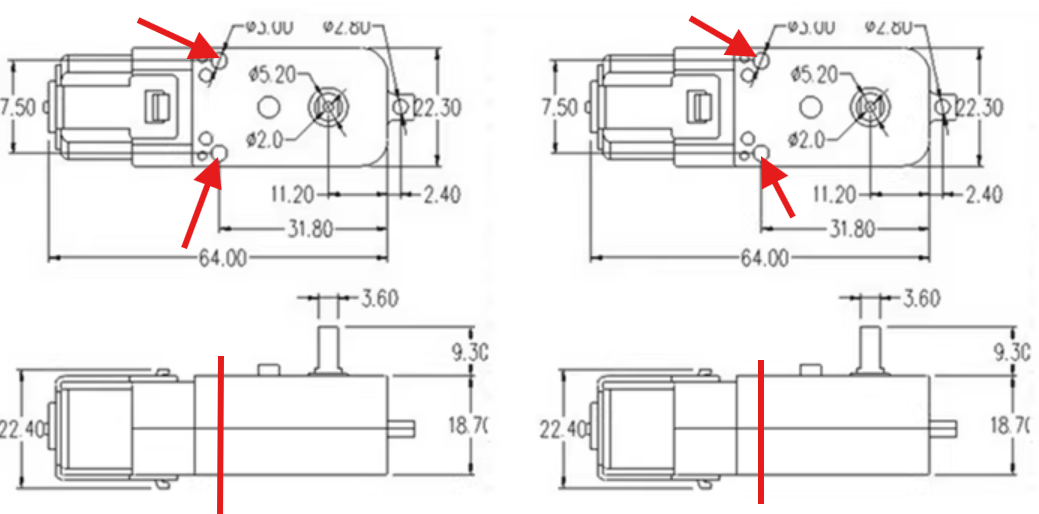

因此一般使用时使用 TT马达 + 支架 的组合。


2-3.2 摄像头 的法兰支架
在openMV/K210/k230/CCD模块/CSI摄像头固定时,大家都热衷于使用 6mm法兰盘 的形式固定:
需要 2 X 6mm内径法兰盘 + 1 X 玻璃纤维轴(玻纤轴)/不锈钢轴/铜轴/银轴/金轴/钻石轴/黑曜石轴
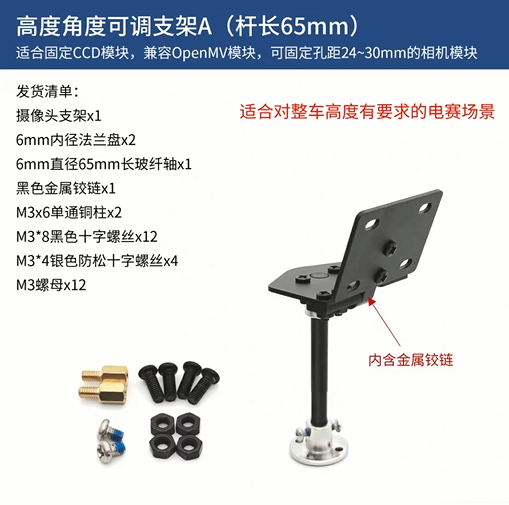
对于这个6mm内径法兰盘 有一到两个侧孔,可以插入顶丝(短的M3螺丝),用于将中间的轴卡死不会滑动或旋转。下方四个孔(M3)固定到底板。

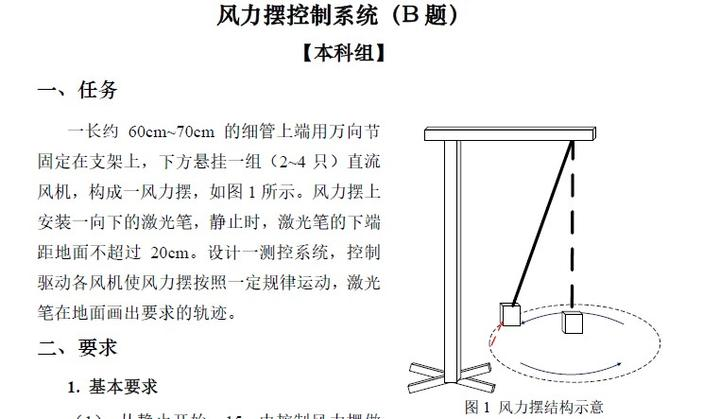
2-3.3 十字万向节联轴器
依旧可以插入6mm内径轴,原本适用于转轴的转向传递,但是也可以用于可自由倾斜的关节点,如电赛的风力摆题目的关节处:

2-3.4 舵机的 支架
舵机支架十分的丰富啊,属于是什么都能拼出来了。
首先,绝大多数舵机的输出轴是 25T (25个tooth小牙,如下图),输出可以选择塑料齿轮/金属齿轮(承重更好);

25T可以通过 25T舵盘 / 25T舵臂进行延展进行螺丝固定,都可以直接插入螺丝固定,其中常见的舵盘孔即为6mm内径法兰盘 的螺丝孔(图片底部),可以直接连接至法兰盘。

值得注意的是,6mm内径法兰盘还有诸多连接方式和支架,可以搜索舵机支架,自己想怎么连就怎么连,拓展性极其强大!!!如下图,出现中间一个大孔周围四个小孔都为6mm内径法兰盘 结构。

比如以下就是这些支架和舵机凑出来的:


HW-3 电子类
3-1 连接线
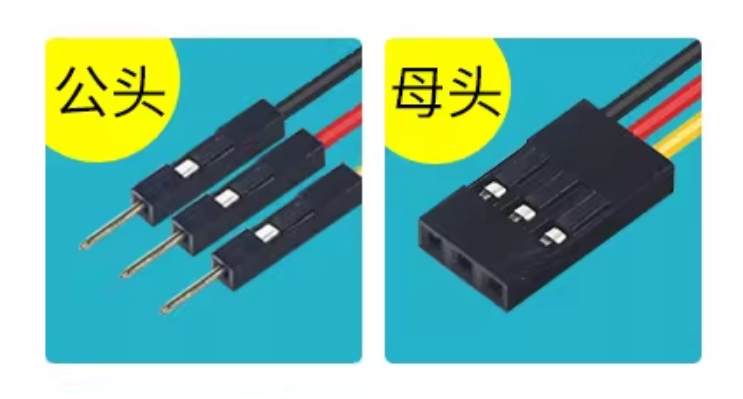
3-1.1 杜邦线
最常见的是2.54mm(1in)间距的杜邦线,用于各个模块/面包板/单片机系统板(绝大多数都是2.54mm间距)之间的连接,线的头分为公头和母头,因此杜邦线分为公-公、公-母、母-母三种类型。

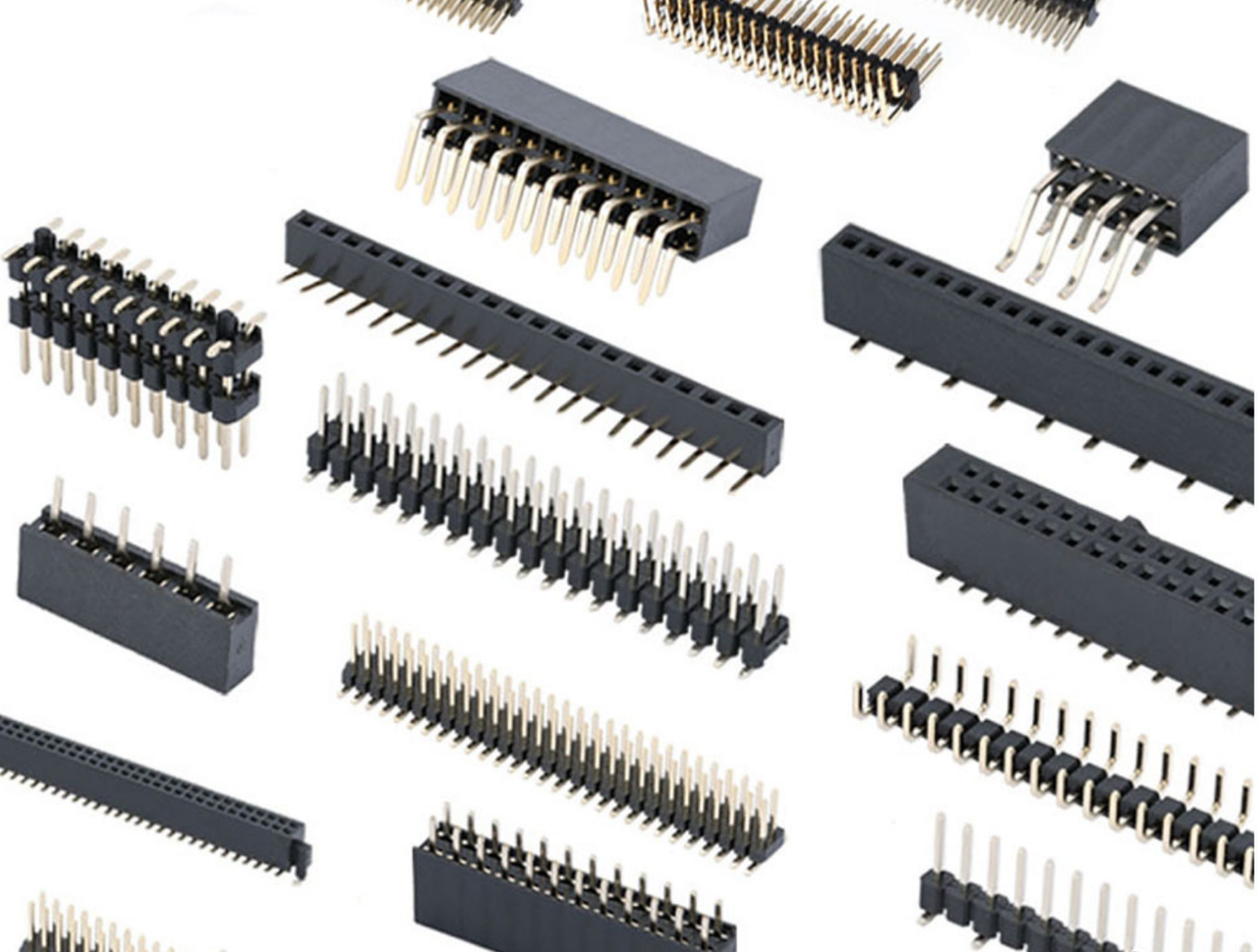
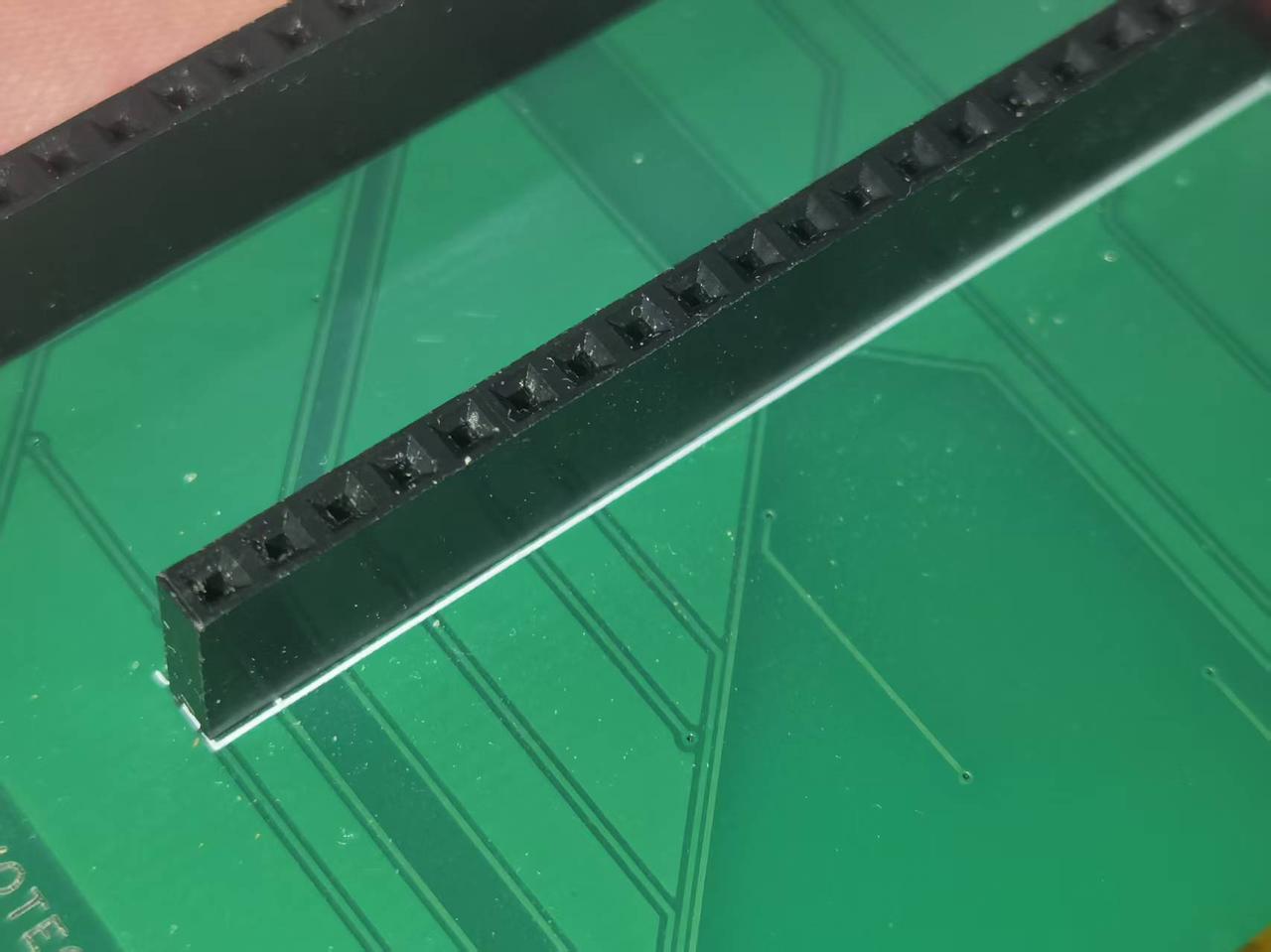
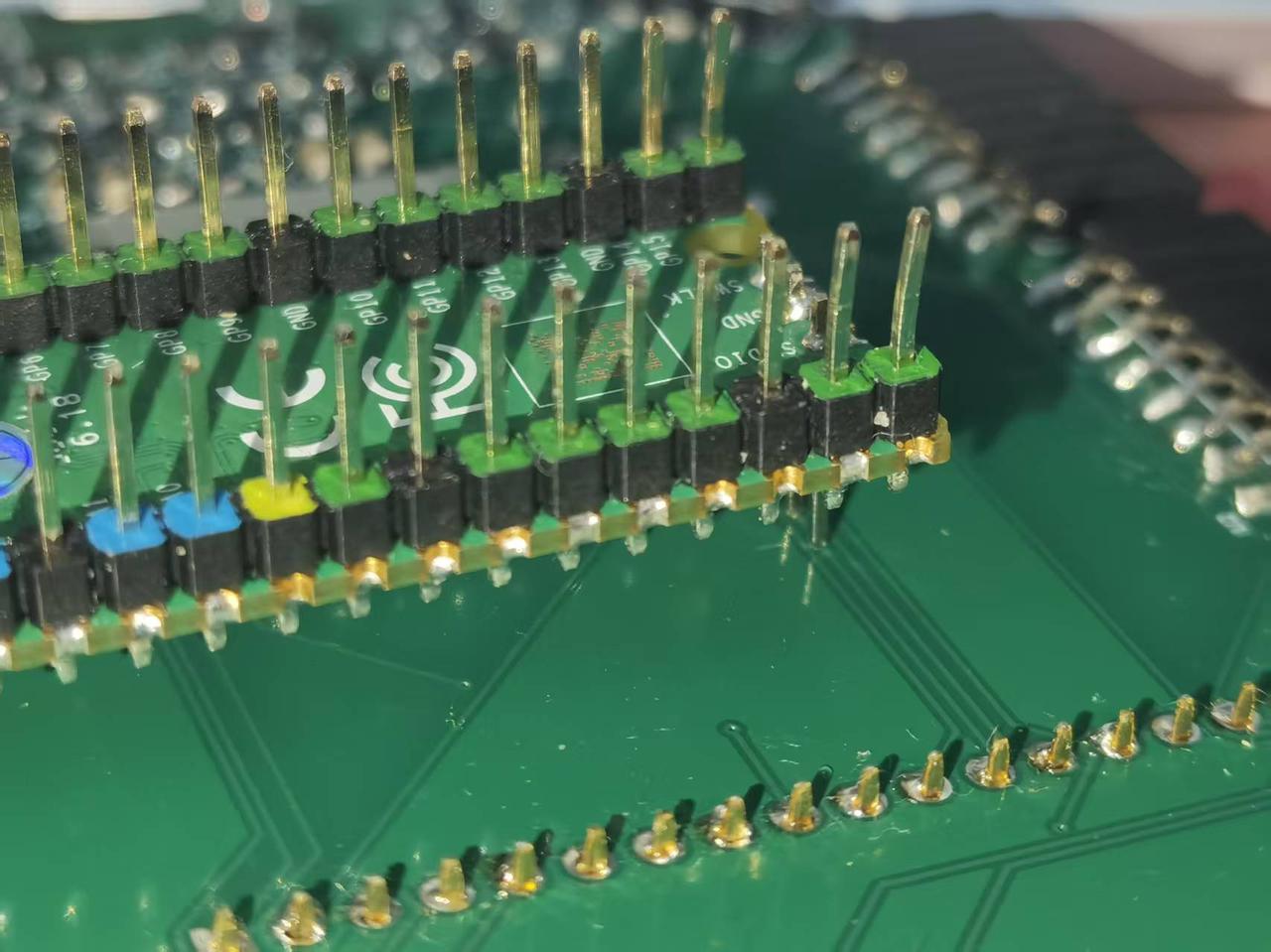
3-1.2 排针/排母
在各种板子(PCB板)上用于连接杜邦线的接口,排针可连接杜邦线母头,排母可连接杜邦线公头。
最最常用的,2.54mm(间距)排针,2.54mm(间距)排母。
3-2 连接板
3-2.1 面包板
全部2.54mm间距,兼容绝大多数电子模块的排针/杜邦线,是前期方案验证/临时电路的绝佳工具。
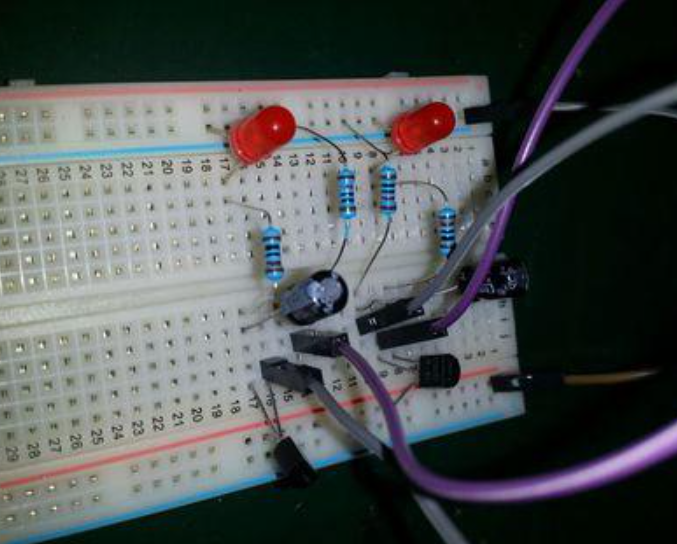
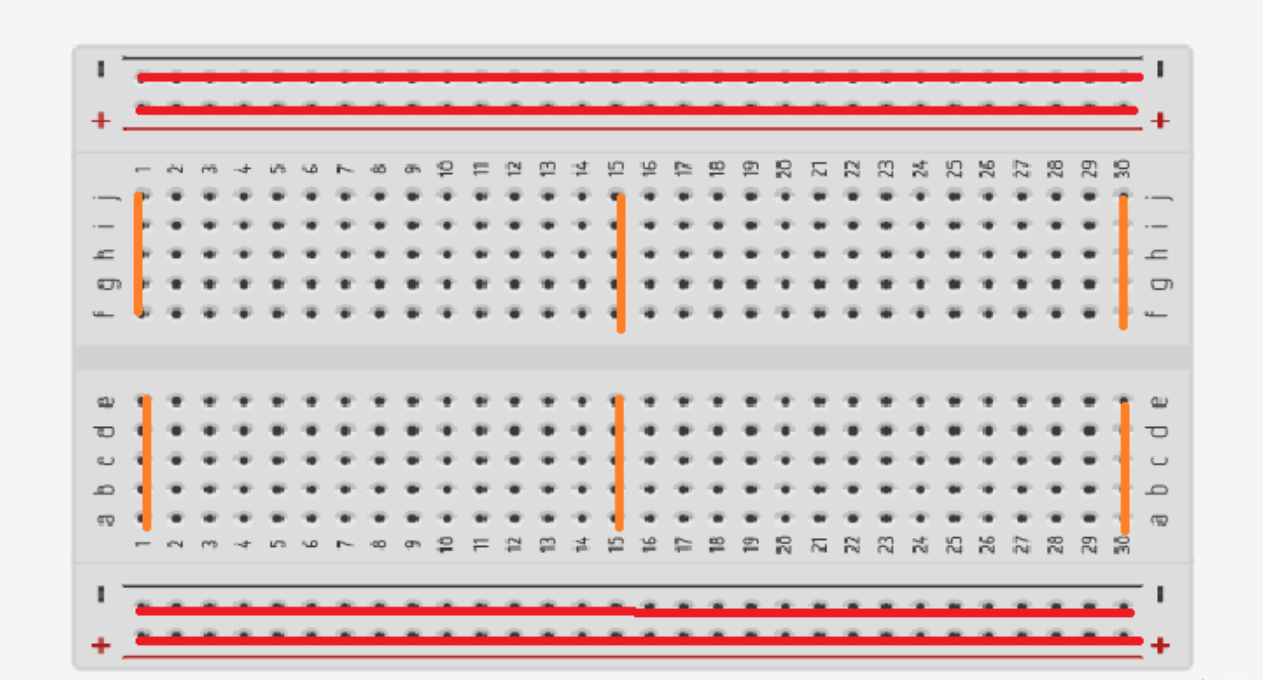
两侧(红线)各个点之间相互导通,适合接入电源轨(如 5V 和 GND)为全局元件供电。
中间(橙线)五个点之间相互导通,适合局部电路的连接。
或者如下图所示,橙色表示相互连接导通,否则不导通。
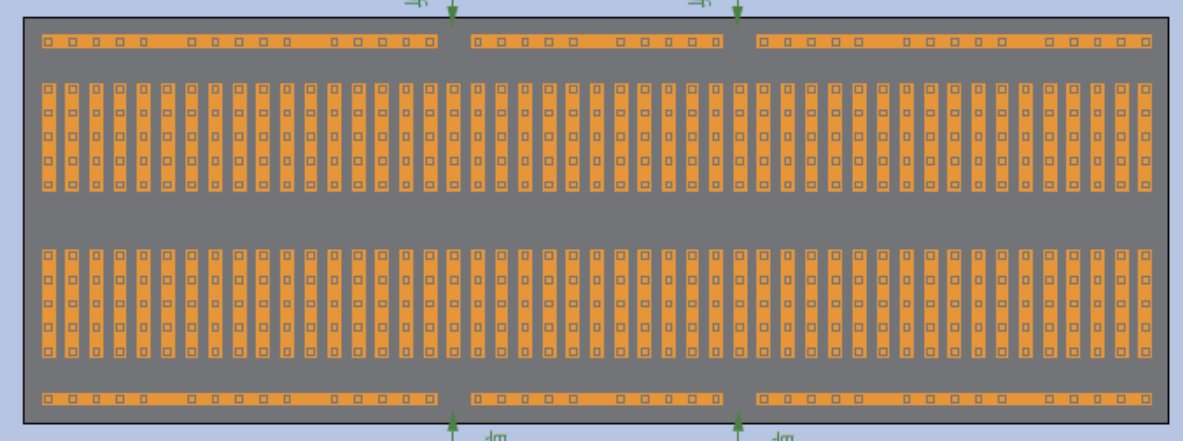
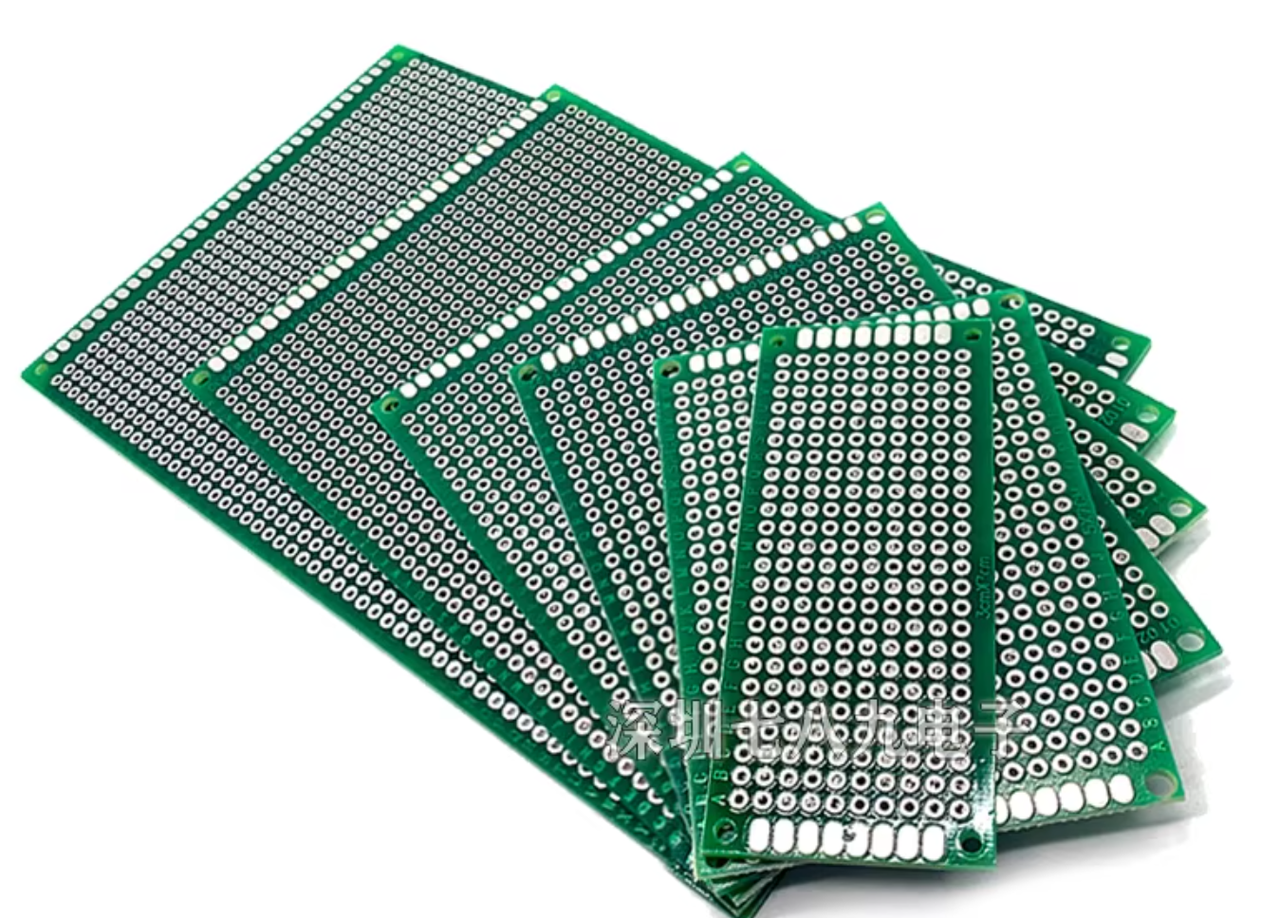
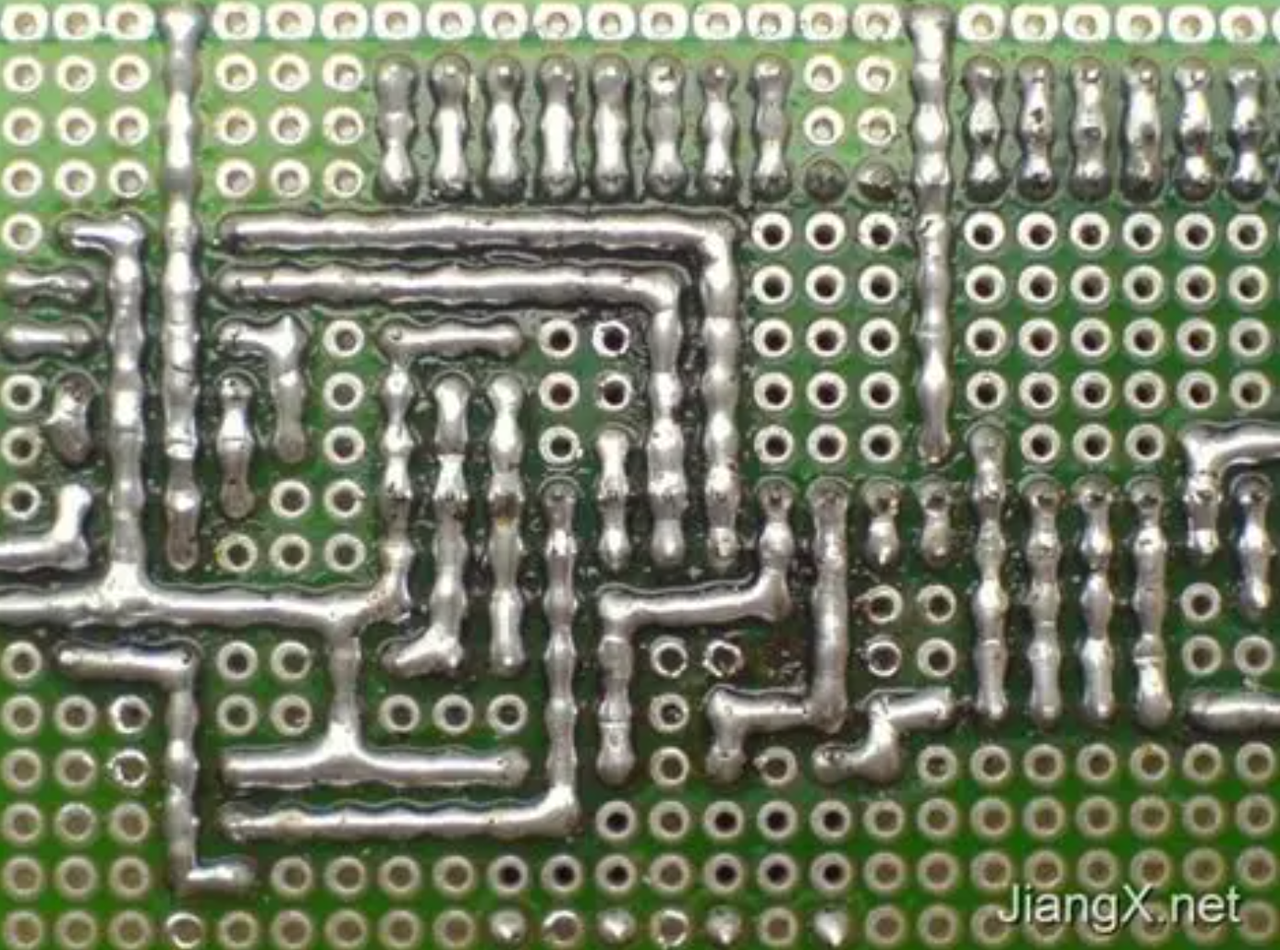
3-2.2 洞洞板(万能电路板)
需要使用电烙铁将焊锡熔化并形成导线路径,或焊接元件。适合快速制作成熟稳定的电路方案。尺寸各异,依旧以2.54mm间距为主。
3-3 电子模块
*电子模块部分引用了 电赛/单片机 不翻页速通手册 的内容,该手册中每个模块提供了B站的视频讲解提供参考
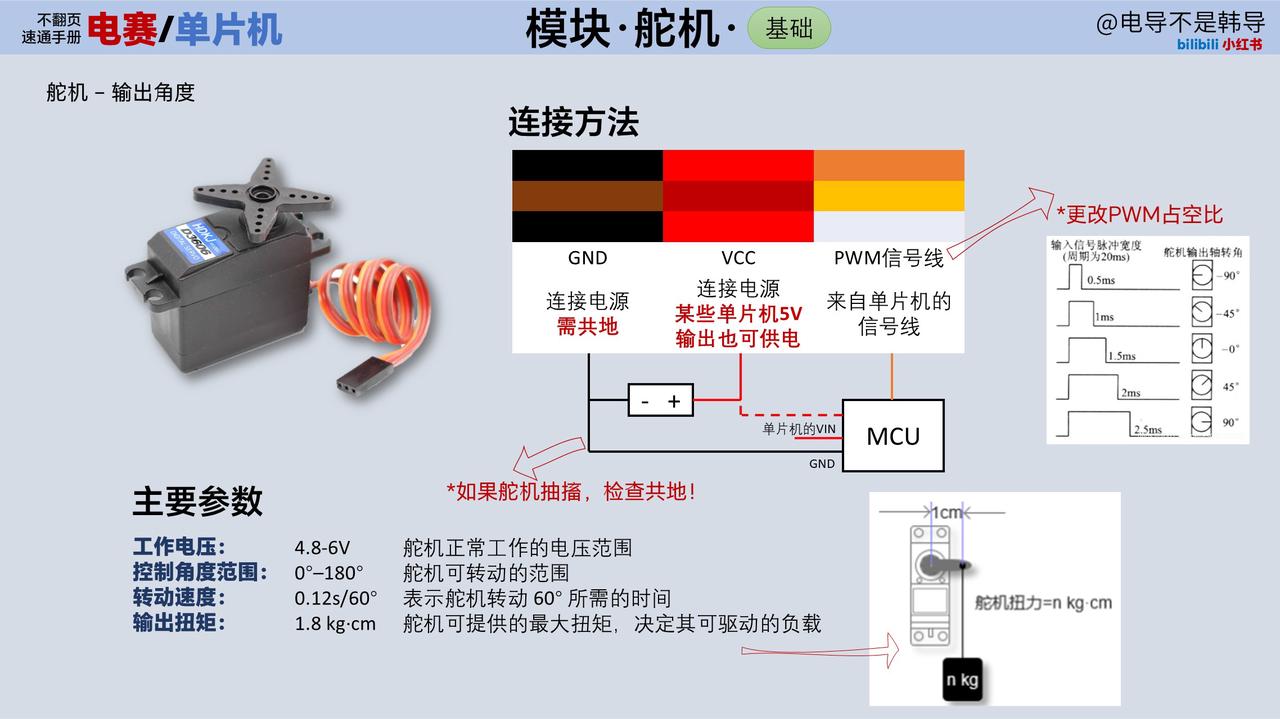
3-3.1 舵机
常用的角度控制模块,核心用于精准角度驱动
核心功能:通过 PWM 信号实现 0-180°/ 0-360° 角度控制,舵机可以自己从任何位置移动到你指定的位置,并且有很大的力矩。
适配场景:云台追踪、机械臂关节、智能车转向控制等
需注意,舵机并不能实现稳定控制的转圈,即在 360° → 0° 的时候不能实现有效控制,想实现转圈+精确角度控制可选:步进电机。
https://www.bilibili.com/video/BV1qCuMztET5
3-3.2 (直流)电机 / TT马达
核心动力输出部件,以有刷直流电机(TT马达)为主,由于电机需要的电路很大,不能直接用单片机的GPIO提供电流,因此需要电机驱动电路(芯片/板),具体参考下方关于TB6612、L298N的描述
核心功能:正转、反转、刹车
https://www.bilibili.com/video/BV1jsuuz8EC6
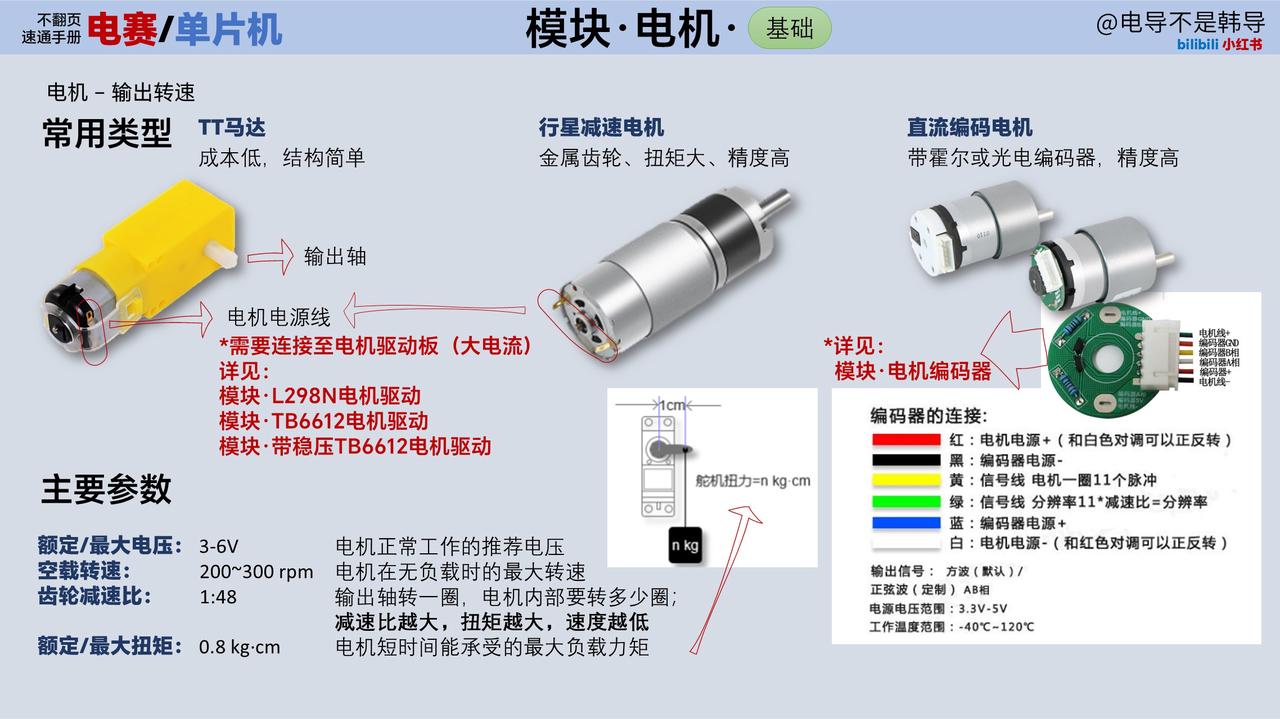
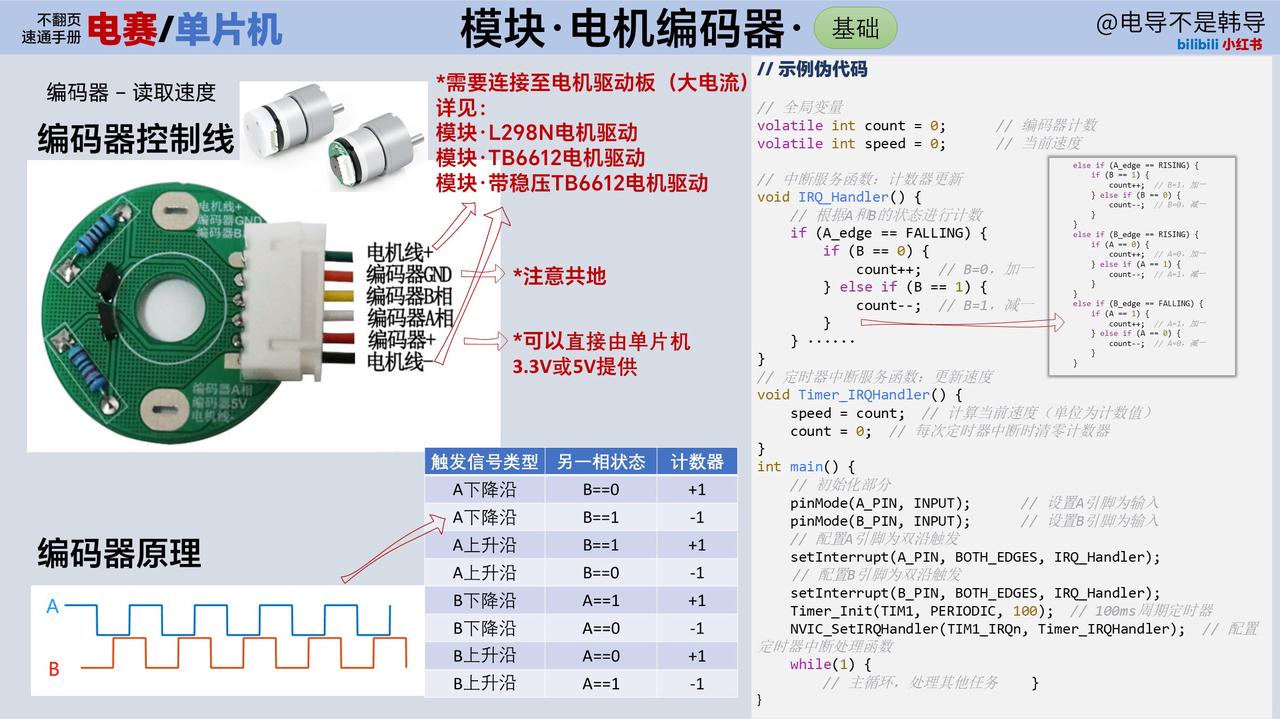
3-3.3 电机编码器
绝大多数装在电机轴的另一侧,可以读取电机实际转了多少角度/方向
https://www.bilibili.com/video/BV1h9uMzDEXP
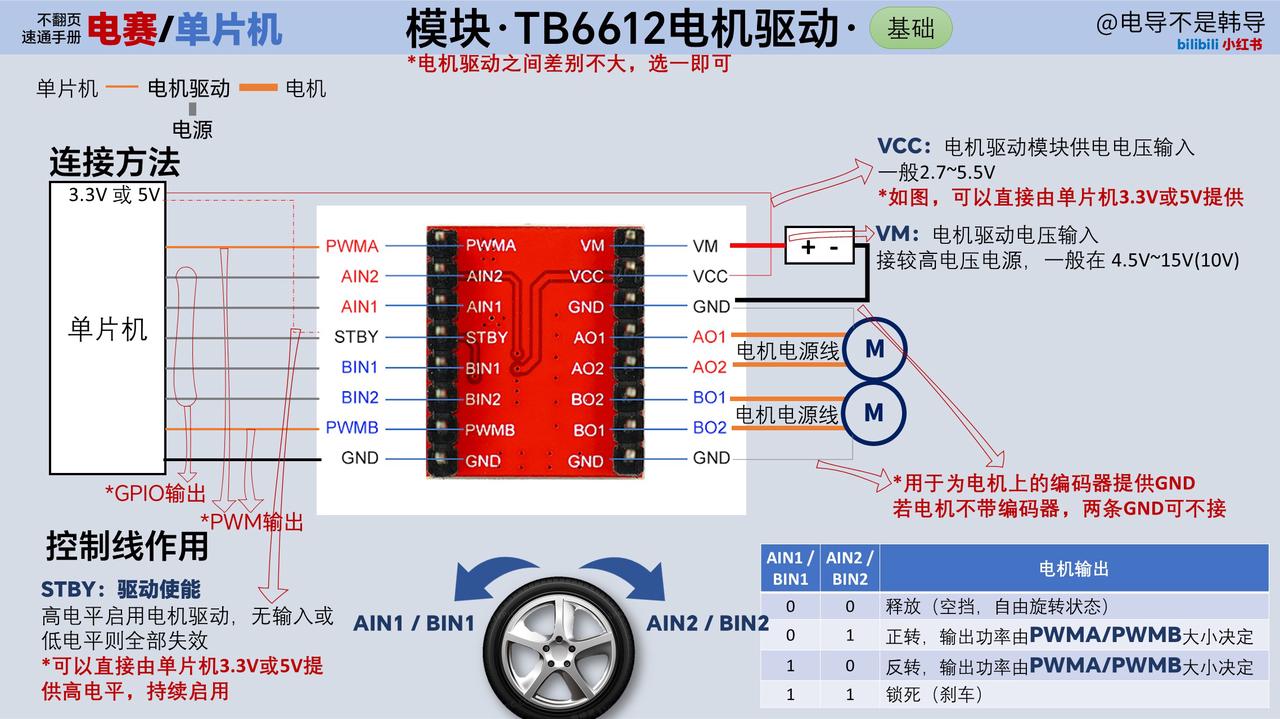
3-3.4 TB6612电机驱动
用于根据PWM控制信号输出驱动电机的电源
https://www.bilibili.com/video/BV1R2uMzxEQm
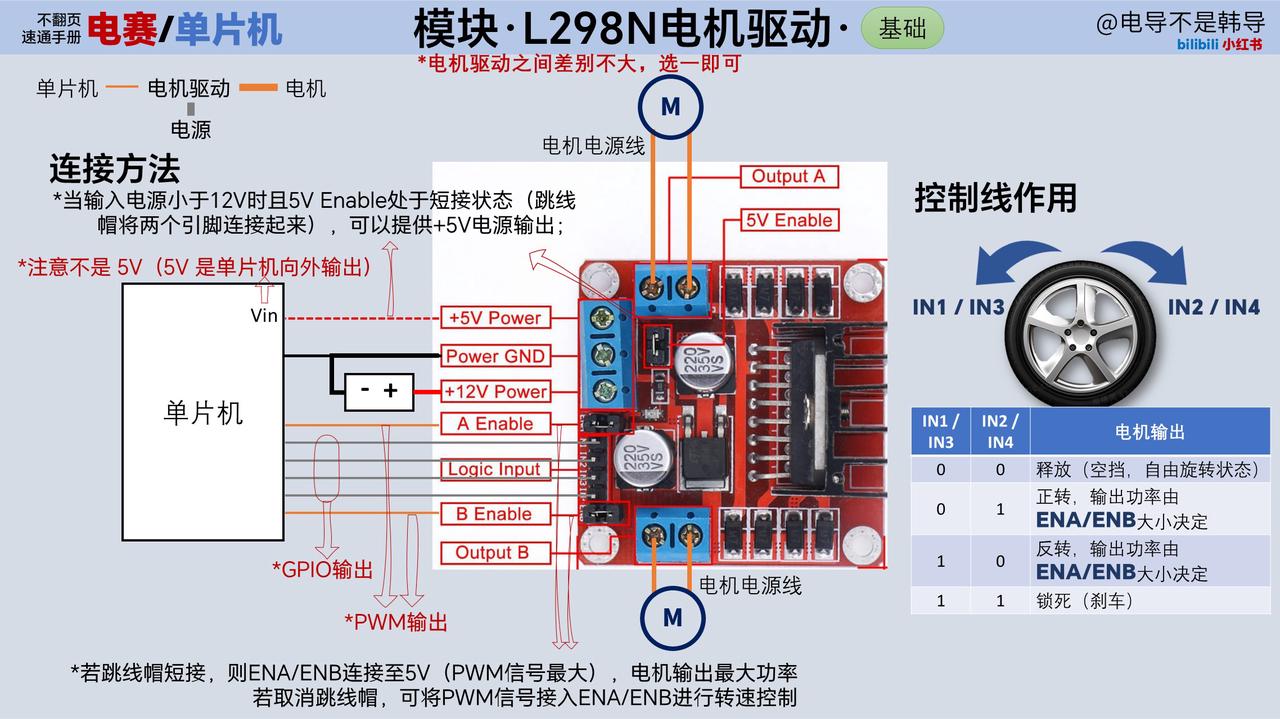
3-3.5 L298N电机驱动
用于根据PWM控制信号输出驱动电机的电源
https://www.bilibili.com/video/BV1xKuuzkENh
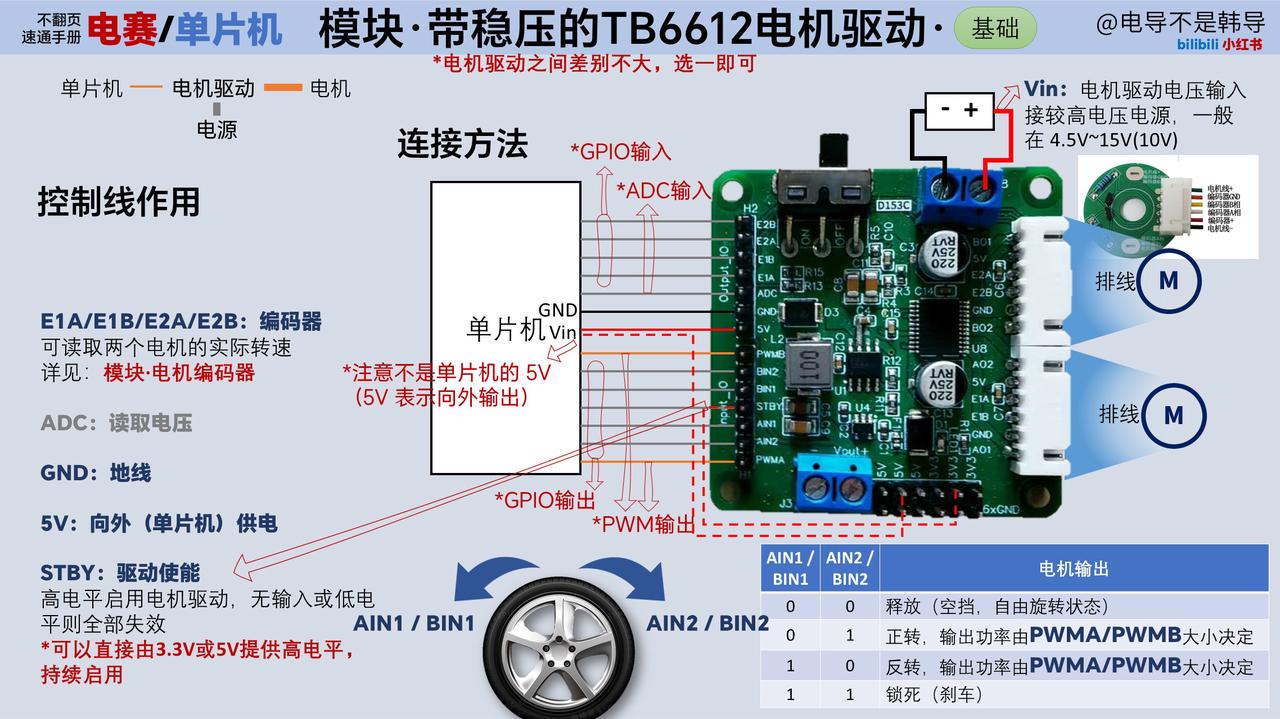
3-3.6 带稳压的TB6612电机驱动
用于根据PWM控制信号输出驱动电机的电源 + 4.5V~15V转3.3V/5V并稳压
https://www.bilibili.com/video/BV1tFuuz2Ezs
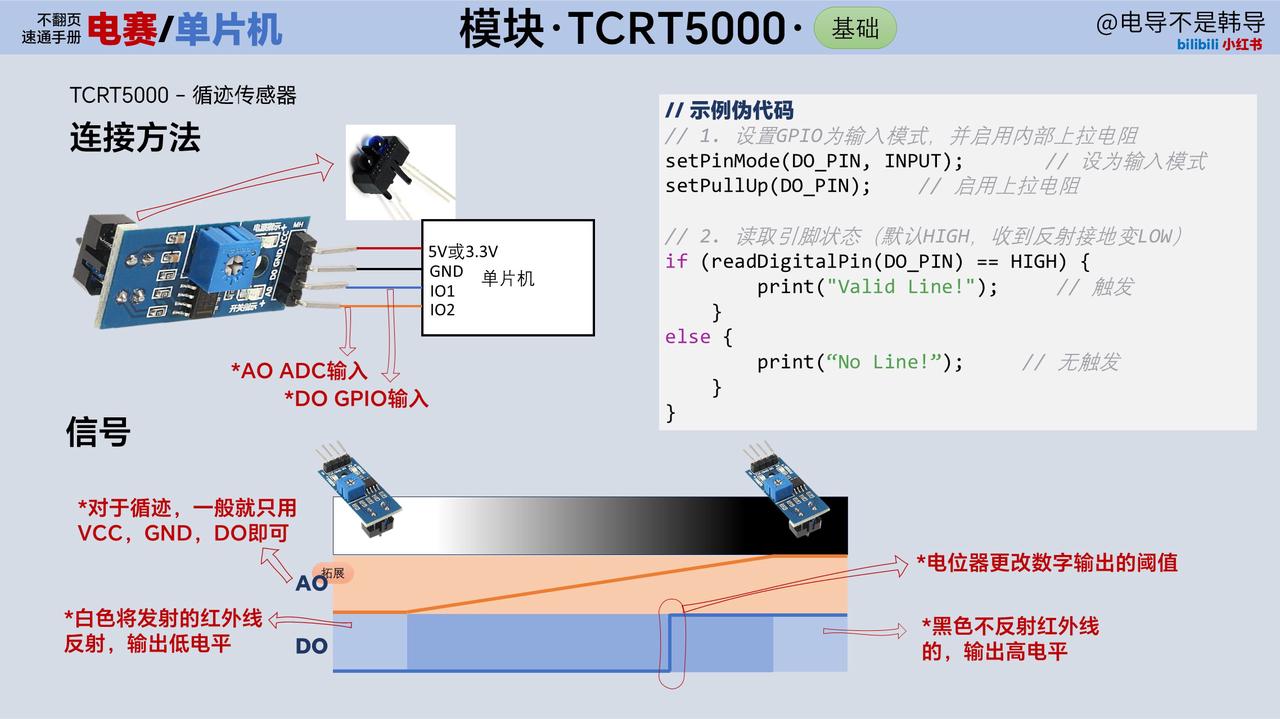
3-3.7 TCRT5000 循迹传感器
智能车循迹核心传感器,基于红外反射原理检测路径
https://www.bilibili.com/video/BV1bCuFzxEqK
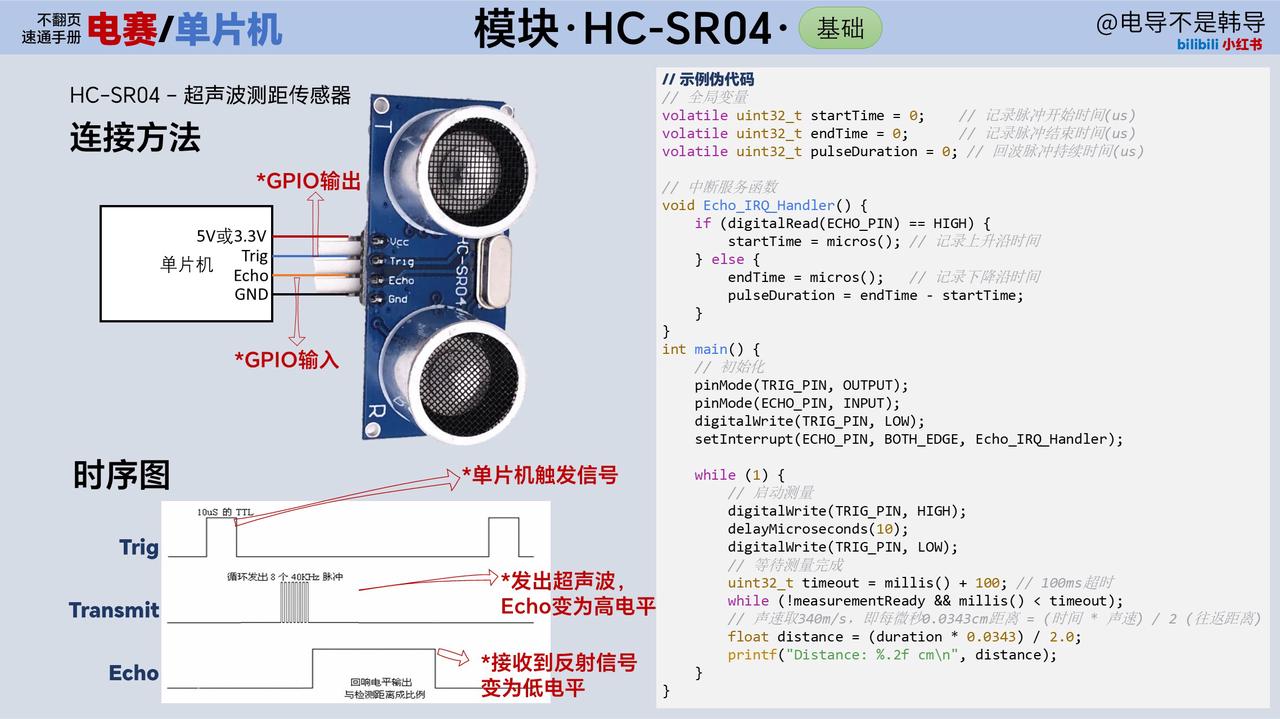
3-3.8 HC-SR04 超声波测距传感器
常用非接触式测距模块,基于超声波反射原理实现距离检测
https://www.bilibili.com/video/BV1LGucziEsL
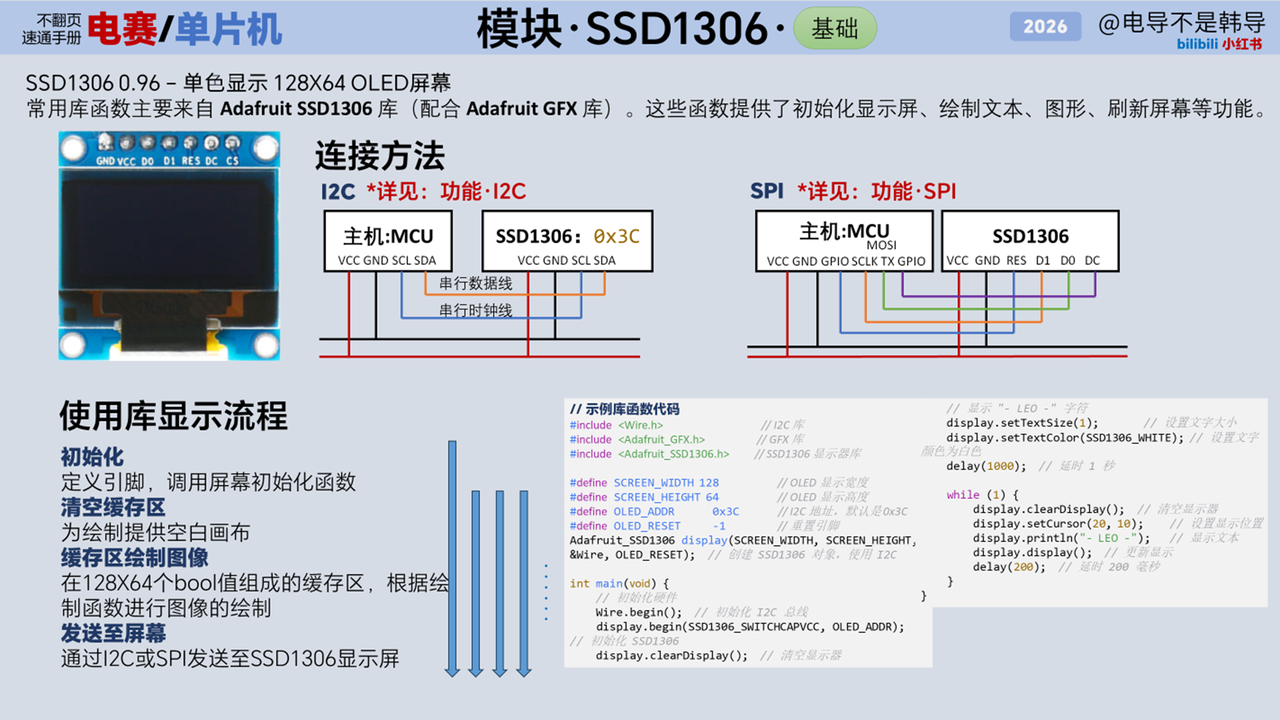
3-3.9 SSD1306 OLED屏幕
低功耗显示模块,核心用于状态数据可视化
https://www.bilibili.com/video/BV1PtuMzzEL8
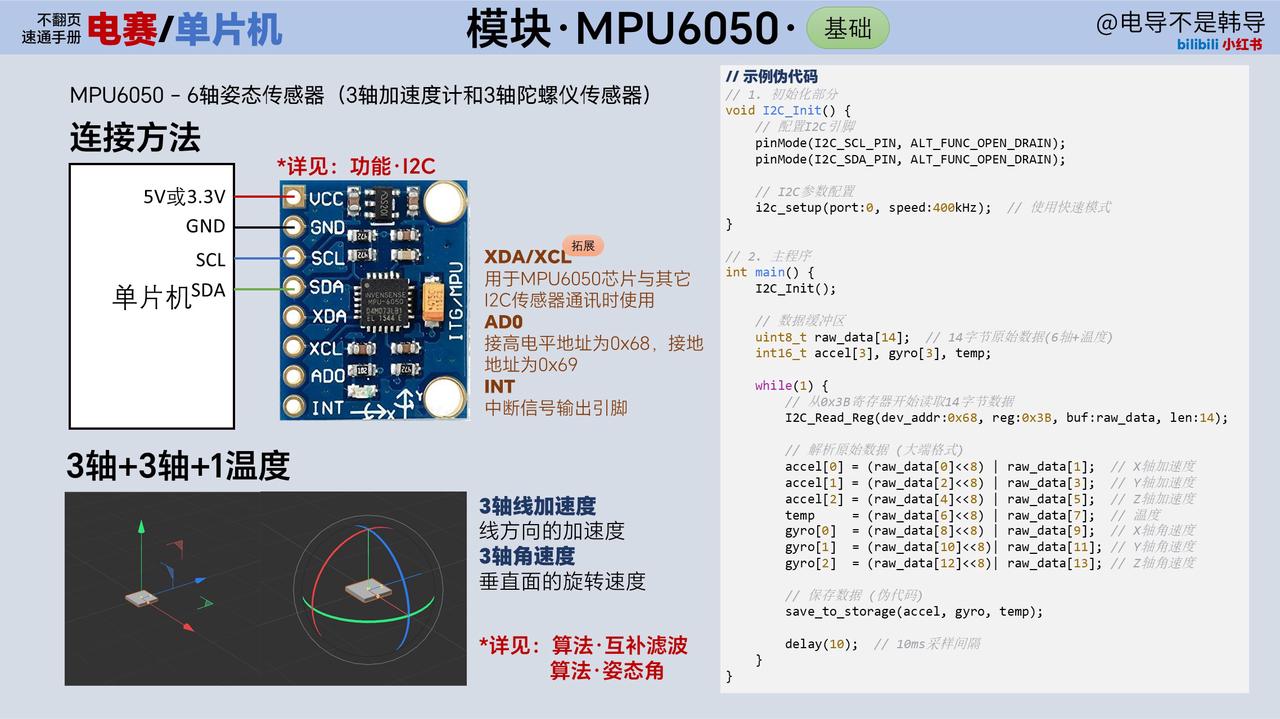
3-3.10 MPU6050 六轴姿态传感器
集成式姿态检测模块,核心用于物体姿态、角速度与加速度检测
https://www.bilibili.com/video/BV14WuMzGEh3
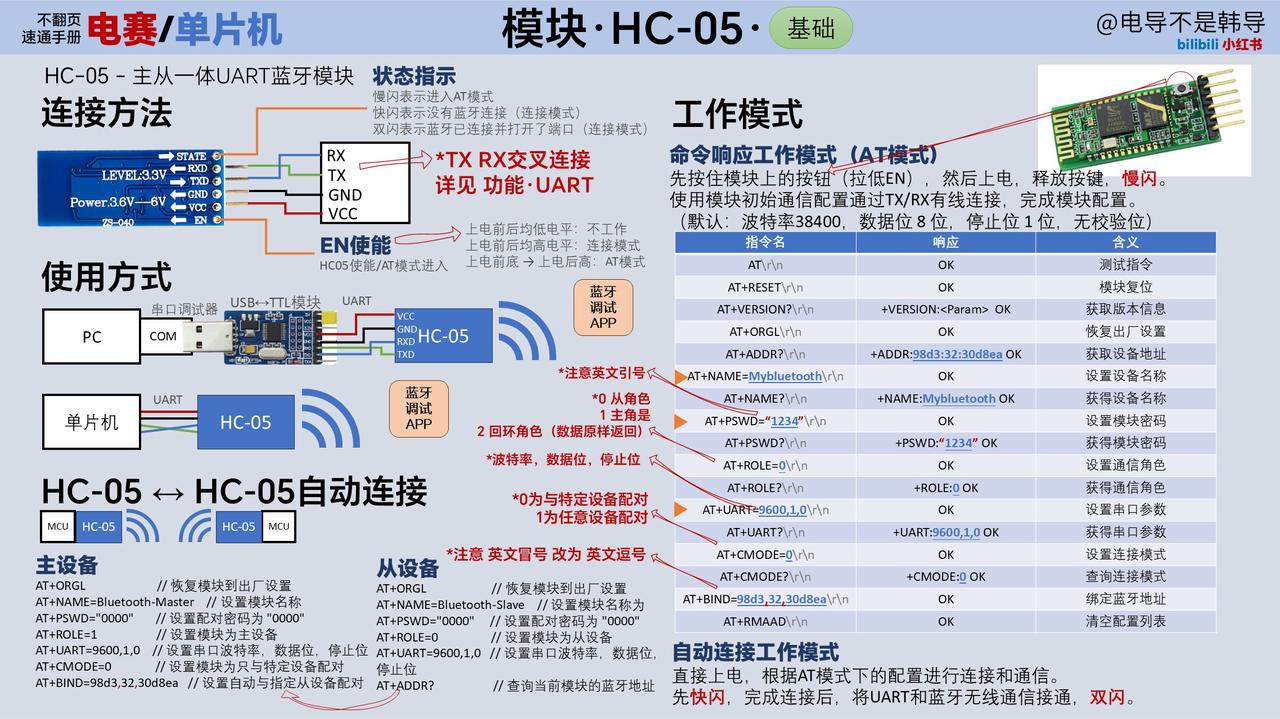
3-3.11 HC-05 蓝牙模块
无线通信模块,核心用于短距离数据传输与远程控制
https://www.bilibili.com/video/BV1byuFzRETX